---
license: cc-by-nc-4.0
task_categories:
- image-segmentation
- image-classification
tags:
- medical
- surgical
- microsurgery
---
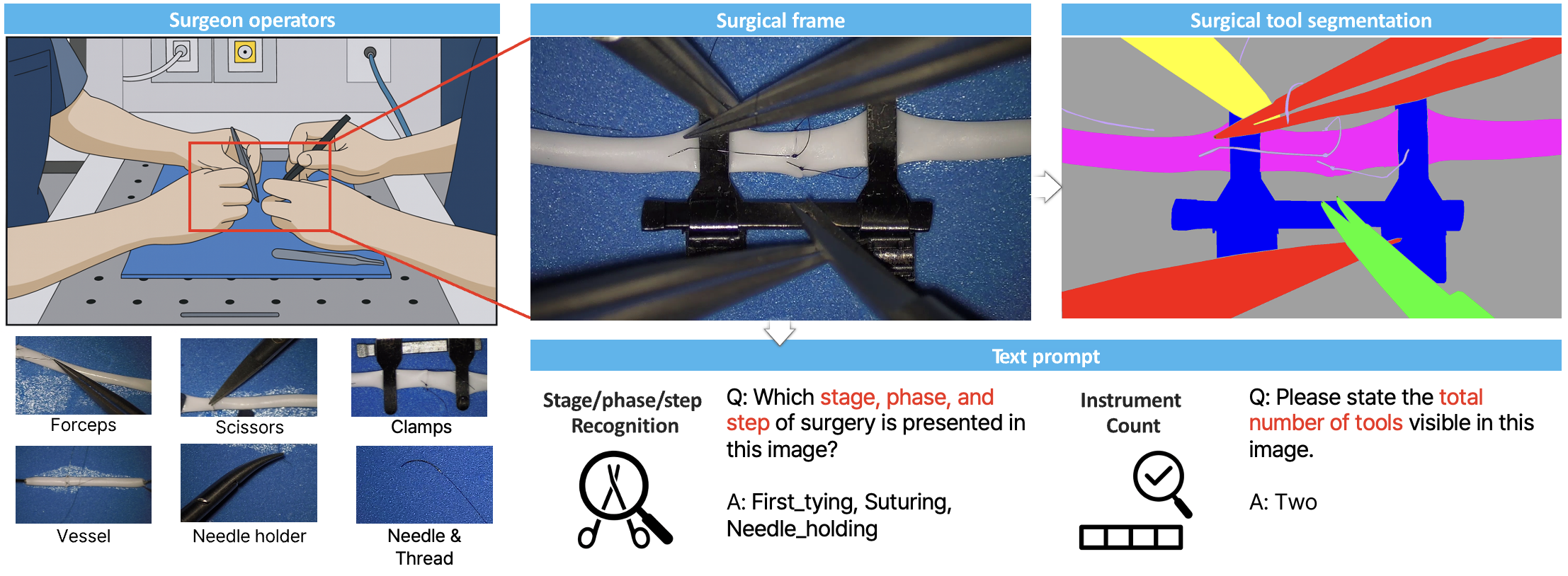
# MAVIS (Micro-surgical Artificial Vascular anastomosIS)
This dataset was presented in the paper: [SurgMLLMBench: A Multimodal Large Language Model Benchmark Dataset for Surgical Scene Understanding](https://huggingface.co/papers/2511.21339).
 ## Dataset Overview
*MAVIS* is a microsurgical dataset comprising 19 videos of artificial vascular anastomosis procedures performed by three expert microsurgeons at *College of Medicine, Korea University*, Republic of Korea.
For each video frame, it provides:
- **Pixel-level segmentation** of seven tool categories
- **Frame-level workflow annotations**: surgical stage, phase, and step
This dataset supports research on surgical tool segmentation and surgical workflow recognition in microsurgical environments.
This dataset was developed by the *Korea Institute of Science and Technology (KIST)* in collaboration with the *College of Medicine, Korea University*.
## Data Details
Each directory in the *MAVIS* dataset stores raw image data, segmentation masks, and annotation files.
- **Directory Structure**
```
MAVIS/
├── frames/
│ ├── CASE01/
│ │ ├── image_00001.jpg
│ │ └── ...
│ ├── ...
├── annotations/
│ ├── long-term.json
│ ├── short-term.json
│ ├── segmentations/
│ │ ├── CASE01/
│ │ │ ├── image_00001.png
│ │ │ └── ...
│ │ ├── ...
│ └── segmentations_with_keypoint/
│ ├── CASE01/
│ │ ├── image_00001.png
│ │ └── ...
│ ├── ...
├── fig/
└── README.md
```
- **Annotation Formats**
- **short-term.json**: polygon mask data for seven tool classes for each frame
- **long-term.json**: stage, phase, and step labels for each frame
- **Stage–Phase–Step Hierarchy**
The workflow annotations are structured into six **Stages**, comprising one or more sequential **Phases**, which in turn consist of multiple sequential **Steps**.
| Phase Class ID | Stage Name | Stage Class ID | Phase Name | Step Class ID | Step Name |
|:--------:|:-----------------:|:--------:|:-----------------:|:--------:|:-----------------:|
| 0 | First tying | 0 | Suturing | 0 | Needle holding |
| 1 | Second 120° tying | 1 | Knot tying | 1 | Needle passing |
| 2 | Second 180° tying | 2 | Cutting | 2 | Needle dropping |
| 3 | Front side tying | 3 | Flip | 3 | 1st knot |
| 4 | Flip | | | 4 | 2nd knot |
| 5 | Back side tying | | | 5 | 3rd knot |
| | | | | 6 | Cutting |
| | | | | 7 | Flip clamp |
## Dataset Overview
*MAVIS* is a microsurgical dataset comprising 19 videos of artificial vascular anastomosis procedures performed by three expert microsurgeons at *College of Medicine, Korea University*, Republic of Korea.
For each video frame, it provides:
- **Pixel-level segmentation** of seven tool categories
- **Frame-level workflow annotations**: surgical stage, phase, and step
This dataset supports research on surgical tool segmentation and surgical workflow recognition in microsurgical environments.
This dataset was developed by the *Korea Institute of Science and Technology (KIST)* in collaboration with the *College of Medicine, Korea University*.
## Data Details
Each directory in the *MAVIS* dataset stores raw image data, segmentation masks, and annotation files.
- **Directory Structure**
```
MAVIS/
├── frames/
│ ├── CASE01/
│ │ ├── image_00001.jpg
│ │ └── ...
│ ├── ...
├── annotations/
│ ├── long-term.json
│ ├── short-term.json
│ ├── segmentations/
│ │ ├── CASE01/
│ │ │ ├── image_00001.png
│ │ │ └── ...
│ │ ├── ...
│ └── segmentations_with_keypoint/
│ ├── CASE01/
│ │ ├── image_00001.png
│ │ └── ...
│ ├── ...
├── fig/
└── README.md
```
- **Annotation Formats**
- **short-term.json**: polygon mask data for seven tool classes for each frame
- **long-term.json**: stage, phase, and step labels for each frame
- **Stage–Phase–Step Hierarchy**
The workflow annotations are structured into six **Stages**, comprising one or more sequential **Phases**, which in turn consist of multiple sequential **Steps**.
| Phase Class ID | Stage Name | Stage Class ID | Phase Name | Step Class ID | Step Name |
|:--------:|:-----------------:|:--------:|:-----------------:|:--------:|:-----------------:|
| 0 | First tying | 0 | Suturing | 0 | Needle holding |
| 1 | Second 120° tying | 1 | Knot tying | 1 | Needle passing |
| 2 | Second 180° tying | 2 | Cutting | 2 | Needle dropping |
| 3 | Front side tying | 3 | Flip | 3 | 1st knot |
| 4 | Flip | | | 4 | 2nd knot |
| 5 | Back side tying | | | 5 | 3rd knot |
| | | | | 6 | Cutting |
| | | | | 7 | Flip clamp |
[Click to expand] Full annotation hierarchy with descriptions
1. **First tying** (forming the first knot)
1. **Phase: Suturing** – place and position the suture
- **Needle holding**: grasp the suture needle securely with the needle holder
- **Needle passing**: insert the needle through both edges of the vessel and pull it through
- **Needle dropping**: release the needle at the optimal position for tying (≈5 o’clock)
2. **Phase: Knot tying** – create the knot
- **1st knot**: wrap the free end of the suture around the instrument and tighten
- **2nd knot**: repeat wrapping in the opposite direction and tighten
- **3rd knot**: final wrap to secure the stitch
3. **Phase: Cutting** – trim excess suture
- **Cutting**: use scissors to sever both ends of the suture (can cut both at once or sequentially)
2. **Second 120° tying** (forming the second knot at a position rotated 120° from the first tying)
- *Subtasks*: identical to First tying (Suturing → Knot tying → Cutting)
3. **Second 180° tying** (forming the second knot at a position rotated 180° from the first tying)
- *Subtasks*: identical to First tying (Suturing → Knot tying → Cutting)
4. **Front side tying** (additional knot on the front face between first and second)
- *Subtasks*: identical to First tying (Suturing → Knot tying → Cutting)
5. **Flip** (reorient vessel for back‐side access)
- **Phase: Flip** – flip the vessel clamp
- **Flip clamp**: reposition the clamp so that the vessel’s backside faces the camera
6. **Back side tying** (forming knots on the backside between first and second)
- *Subtasks*: identical to First tying (Suturing → Knot tying → Cutting)
- **Tool Segmentation Classes**
The dataset contains the following surgical tool classes:
| Class ID | Class Name |RGB Color |
|:--------:|:----------------:|:--------------:|
| 0 | forceps |(253, 0, 26) |
| 1 | scissors |(43, 253, 62) |
| 2 | vascular_clamps |(0, 43, 249) |
| 3 | needle_holder |(255, 253, 66) |
| 4 | vessel |(253, 40, 250) |
| 5 | needle |(38, 255, 254) |
| 6 | thread |(198, 161, 251) |
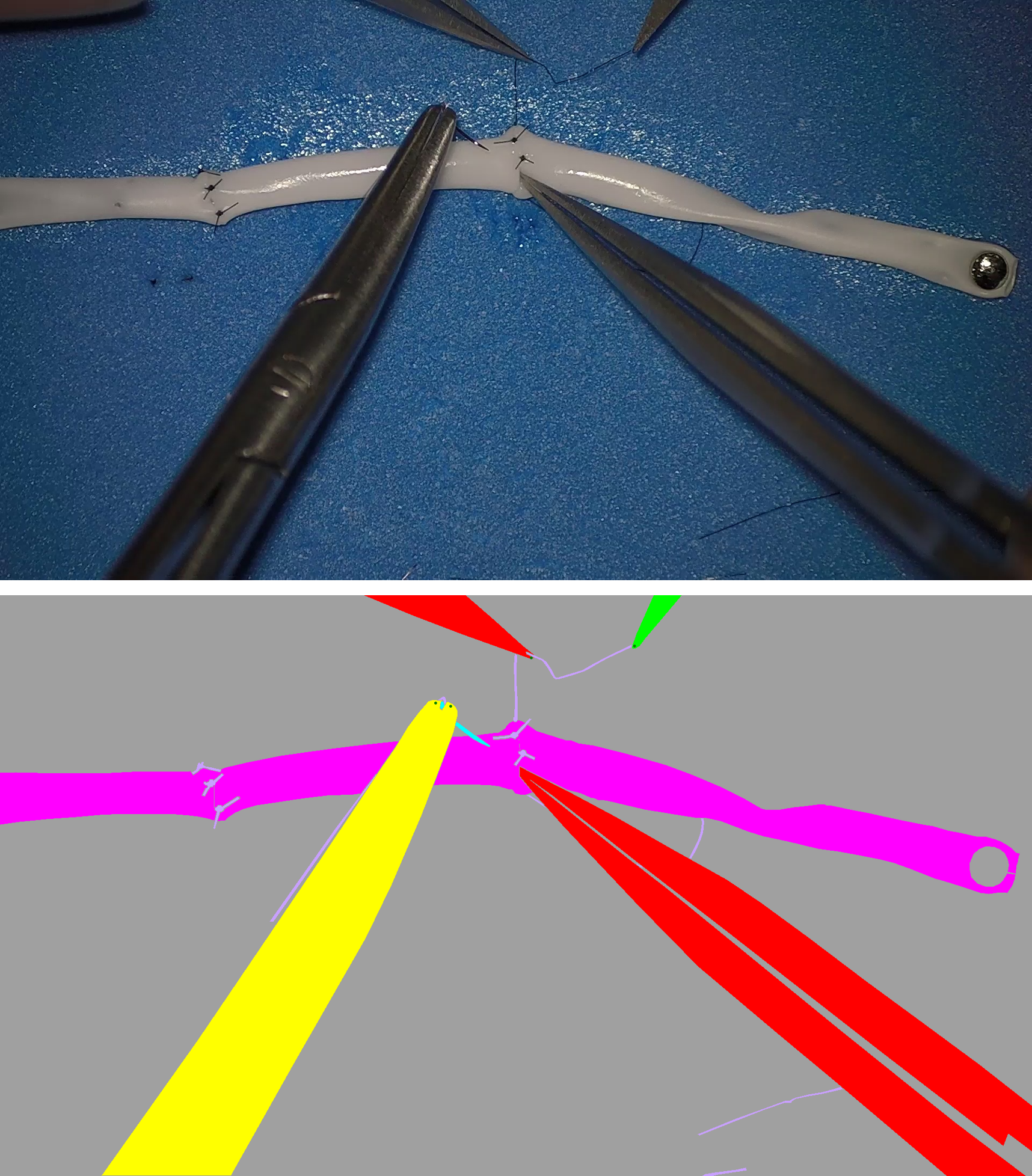
## Examples of Labeled Data
Figures 1, 2, and 3 show examples of the dataset with segmentation labels.
Figure 1 | Figure 2 | Figure 3
:-------------------------:|:-------------------------:|:-------------------------:
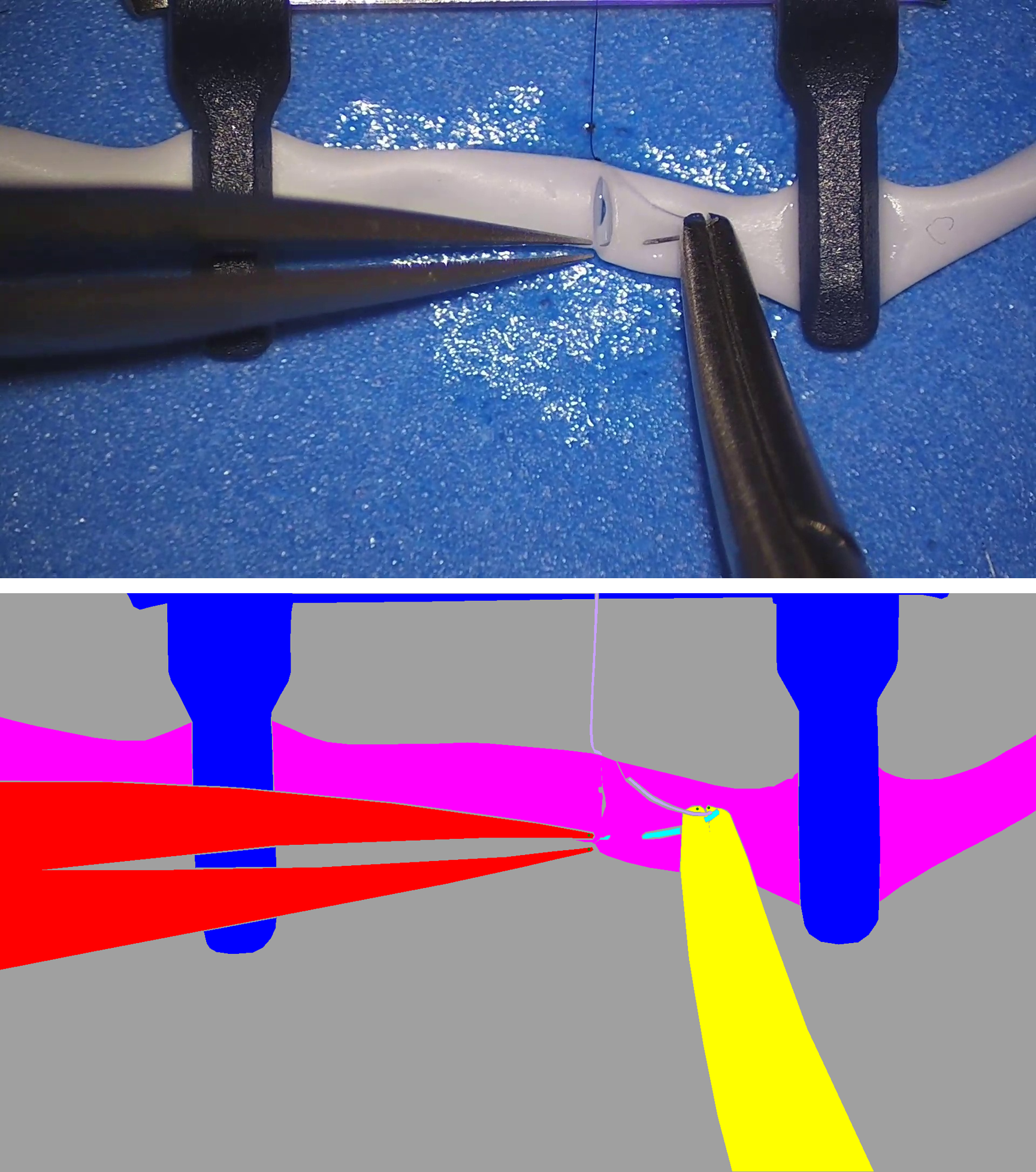 |  | 
## Citation
```bibtex
@misc{choi2025surgmllmbenchmultimodallargelanguage,
title={SurgMLLMBench: A Multimodal Large Language Model Benchmark Dataset for Surgical Scene Understanding},
author={Tae-Min Choi and Tae Kyeong Jeong and Garam Kim and Jaemin Lee and Yeongyoon Koh and In Cheul Choi and Jae-Ho Chung and Jong Woong Park and Juyoun Park},
year={2025},
eprint={2511.21339},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2511.21339},
}
```
## Acknowledgment
This work was supported by the Technology Innovation Program (No. RS-2024-00443054) grant funded by the Korea government (the Ministry of Trade, Industry & Energy (MOTIE)).
- **Project Name:** Development of a Supermicrosurgical Robot System for Sub-0.8mm Vessel Anastomosis through Human-Robot Autonomous Collaboration in Surgical Workflow Recognition
- **Project Number:** RS-2024-00443054